
Indrek Must – Insener, kelle töö on taimede jäljendamine

Tekst: Jonas Nahkor , fotod: Indrek Musta erakogu
Biomimikri kirjeldab olukorda, kus inimene matkib elusorganismi mõnd struktuuri või ülesannet, et oma loodud lahendusi seeläbi täiustada. Mõned säärased näited pärinevad aero- ja hüdrodünaamika või arhitektuuri valdkondadest, ent inspiratsiooni on leidnud ka materjaliteadlased ja meditsiinivahendite loojad. Indrek on võtnud ette biomimikri järgmise taseme – tema eesmärk on luua roboteid, mis jäljendavad päris elusorganismi funktsioone ja liikumist kuni päris baasiliste mehhanismideni välja. Rääkides elusolendi liikumisest, torkavad esmalt pähe seosed loomariigiga, aga ei – tema jäljendamise objektiks on hoopis taimed! 
“Puudutus” on robootikas suhteliselt tundmatu mõiste
Ajalooliselt hakkasid robootikud tehislihase otsingul jäljendama loomi ja putukaid. Siiski, umbes 30 aastat hiljem ei ole tehislihased looduslikega võrdväärsed või ei jäljenda inimese loodud lihased tegelikku toimimismehhanismi. Taimed liigutavad ilma lihasteta ja teevad seda hoopis teistmoodi.
„Algul tundub taim nagu staatiline organism ja tekib küsimus, et mis robootikat me taimedest teeme. Ka kasvamine on liigutus ning neid liigutusmehhanisme on võimalik palju suuremal määral jäljendada. Kusjuures, näiteks viinamarja köitrao liigutust võib aktiivses faasis isegi silmaga näha.“
Itaalias järeldoktorantuuris tegeles Indrek ronitaimede köitraagude jäljendamisega. Nende struktuurist on võimalik teha tehislik analoog, kusjuures kopeerida saab ka teatud keemilisi mehhanisme selliselt, et neid kasutatakse tehnilises süsteemis. Jah, paistab et tõesti on võimalik, nii 10-15 aasta perspektiivis, luua robot, mis matkib lähedalt taimede liikumismehhanisme. Mis rakendust võib sellisel põhimõttel toimiv robot endale leida?
„Seda on vaja kasutada olukordades, mis nõuavad väga head ühildumist keskkonnaga ja eriti tundmatu ümbrusega. Taimel ei ole väga palju sensoreid peale köitrao – ta peab selle lihtsa struktuuriga väga palju teada saama oma keskkonna kohta ja end ankurdama. Ta ei hakka ju igast asjast kinni ega ka mitte sellest taimest, mille osa ta on. See kommunikatsiooni aspekt – kuidas ta saab aru, mille vastu ta puutus – on väga huvitav uurimisobjekt taimebioloogide jaoks.“
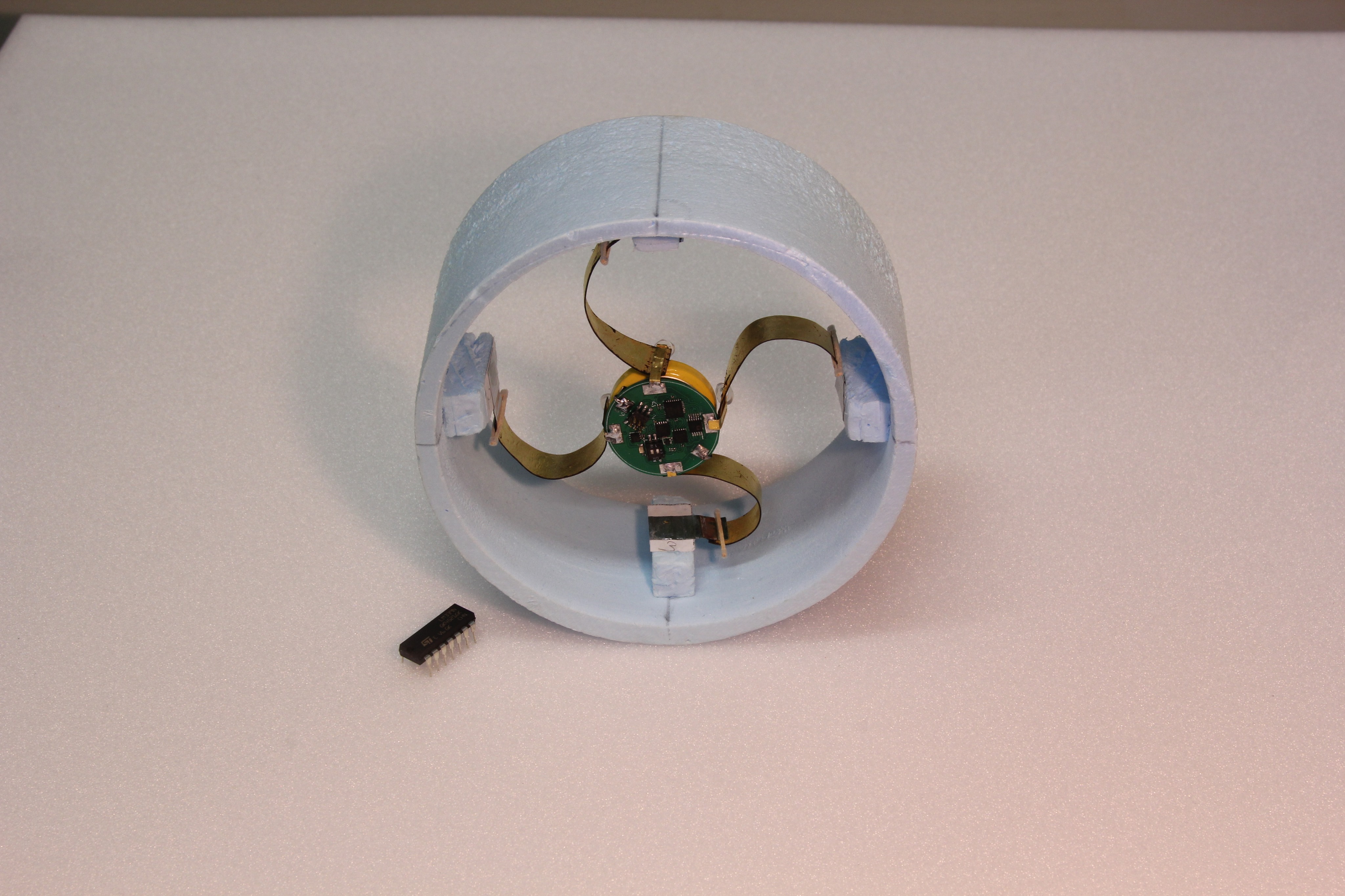
Asju haarata ja ankurdada saaks väga paljude olemasolevate tehnoloogiatega. Kui aga jäljendada köitrao mehhanismi, siis osutub see robot väga ohutuks – roboti ehitamiseks saab kasutada samu materjale, millest koosneb taim. Neid roboteid võiks põhimõtteliselt saada isegi süüa. Sellised omadused tähendavad, et roboti saaks panna inimese organismi sisse näiteks meditsiinilistel eesmärkidel tööle.
„Kindlaid tegevusi teevad hetkel inimkäed paremini kui kõige parem robot ja vastupidi. Robot paneb mobiiltelefoni palju kiiremini ja täpsemini kokku, samas kui sellise triviaalse asjaga nagu tomati korjamine saab inimkäsi palju paremini hakkama. Miks on inimkäsi teatud asjades parem? Tuleb välja, et näiteks selline mõiste nagu puudutus on robootikas suhteliselt tundmata.“
 Robootikainsener, kes töötuab keemialaboris
Robootikainsener, kes töötuab keemialaboris
Tartu Ülikoolis tegutseb intelligentsete ja arukate materjalide labor, mille koosseisus Indrek töötabki. Kõige fundamentaalsemal tasandil uuritakse selles laboris, mismoodi molekulaarne liikumine toimub. Seejärel sünteesitakse selliseid materjale, mis muudavad enda kuju. Viimase etapina uuritakse tehislihase toimimist täiturina – kui on aru saada, kuidas elektriline sisend tehislihasel toimib, saab alustada roboti valmistamisega.
Seega – otseselt teadustööle panustatud aeg ei möödu Indreku jaoks niivõrd treipingi taga istudes või koodi kirjutades, vaid keemialaboris materjaliteadust tehes.
„Mulle meeldib pigem rääkida endast kui insenerist ja inseneri kogukonnale. Traditsioonilise inseneri jaoks on minu lähenemised veidi võõrad – ma lähenen materjalide, mitte matemaatika ja modelleerimise tasandil.“
Nagu tänapäeva teadlasele kohane, on ka Indreku tööks rohkem kui poole oma ajast uusi projekte kirjutada.
„Hetkel tegelen ERC grandi taotlemisega – see on rõhutatult uute, riskantsete ideede arenduseks. Palju ülistatakse ettevõtluspõhist majandusmudelit, kus tahetakse tulemusi maksimaalselt 5 aasta skaalas. Sellise mudeli puhul kipuvad arendused minema üha inkrementaalsemaks.“
Need pehmerobootika rakendused, mis võiks olla kommertsialiseeritud, saavad selleks 10-20 aasta pärast ning võimalikke rakenduskohti alles leitakse.
„Mitte nii futuristlik valdkond on eksoskeletid. Kombinesoon võib toetada inimest, kellel on liikumisvaegus või annab omadusi, mis muidu ei esineks. Ta võtab infot vastu ja selle põhjal tegutseb kehaga kaasa – selline kontseptsioon on hetkel arendamises ning pehmerobootikas üks olulisemaid väljundeid. Üks lahendus, mis on hakanud turule tulema, on tehasetööliste ja ehitajate selja toestamine. Inimene ei tunnegi, et tal midagi seljas on, aga ta omandab natuke supernaturaalsed võimed.“
Arutleda saab paljudel perspektiivsetel teemadel. Näiteks – miks on uss paljudel maastikel efektiivsem liikuja, kui meie parim roomikutel või ratastel masin?
„Kuju muutmine annab võimaluse liikuda mitte ainult siledal maal vaid struktureerimata looduskeskkondades ja katastroofipiirkondades. Miks on uss efektiivsem liikuja, kui ratastel liikur? Ta liigub kuju muutes. Uus tehnoloogia pakub uusi võimalusi, mida praeguse tehnoloogiaga ei ole üldse perspektiivne arendada.“
Alusteaduste perspektiiv ulatub aastakümnetesse
Indrek alustas tehislihase jaoks vajalike materjalide uurimisest, kuid teadmine ei olnud siis veel sealmaal, et osataks näha, kuidas valmislahendus üldse robotite sees kasutades välja näeks. Eriti kehtis see taimepõhise pehmerobootika valdkonnas, mis on vähemuuritud. See kõik on tema töö käigus ja suuresti tänu tema panusele palju selgemaks saanud.
Süvenenud tegutsemine ühe idee kallal, millele ei saa külge pookida korralikku äriplaani, on tänases kiirenevas ettevõtluskeskses formaadis pigem harvenev. Kuid nagu öeldud – liiga lühikese arendusperioodiga lahendused toodavad väikesi edasiminekuid, seevastu oma valdkonda põhjalik sukeldumine võimaldab pinnale tuua paradigmaatilisi muutusi tehnoloogilises võimekuses.
Artikkel on avaldatud: 8.10.2020



Sündmused

Hullu Teadlase suvine linnalaager
Lossi 25, 51003 Tartu

EKHÜ suveakadeemia
Alustava LTT huviringi juhendaja koolitus
Tehnoloogiavaldkonna suveseminar 2026 “Kuidas kasvatada järgmise põlvkonna insenere?”
Viljandi Kutseõppekeskuses
Miks.ee suvekool
Narva-Jõesuus, Meresuu SPA
Näitused

Rändnäitus „Lähme nulli!“
Energia avastuskeskus, Tallinn

Ettevaatust, ebamugavus!
AHHAA Teaduskeskus
Hüvasti, noorus! Kuidas sina tahad vananeda?
Eesti Tervisemuuseum
Tartu Ülikooli loodusmuuseumi näitus „Maa ja vee vahel – meie särisev suhe soodega“
Tartu Ülikooli loodusmuuseum, Vanemuise 46
Mis on valgus? Georg Friedrich Parroti füüsikakabinet
Tartu Ülikooli muuseum, Lossi 25