
Robootikainsener Veiko Vunder

Mulle meeldib töö, mis on iga päev erinev ja ei saa kunagi otsa.
Külm sõda tõi enesega kaasa tuumavõidujooksu. Tuumapommide valmistamiseks toodeti nii palju plutooniumi, et kui Ameerika Ühendriigid tahaks täna mingil põhjusel uusi pomme toota, jätkuks selleks ainuüksi olemasolevatest varudest. Tuumarelvastus on räpane ja seda ka kaudses mõttes. Tuumarelvade tootmisjäätmed on suur keskkonnarisk ka siis, kui neid selleks ehitatud tunneleis hoiustatakse. Suured vihmad ja maavärinad võivad jäätmeladustusehitisi kahjustada, põhjustades radioaktiivse aine lekkeid. Suuremate ohtude välistamiseks tuleb neid tunneleid hooldada ja parandada, kuid see on üsna keeruline väljakutse. Kõige suurem probleem on kahtlemata radioaktiivsus, mis tihti välistab inimtööjõu kasutamise. Masinate kasutamist raskendavad tunnelite lagunemisel tekkinud prügi ja eelmistest hooldustöödest mahajäänud ülesöelnud seadmed. Kõigele lisaks on hoolduse aeg piiratud: töid saab teha vaid mõnel päeval aastas, kui jäätmeid jahutav ventilatsioon on välja lülitatud.
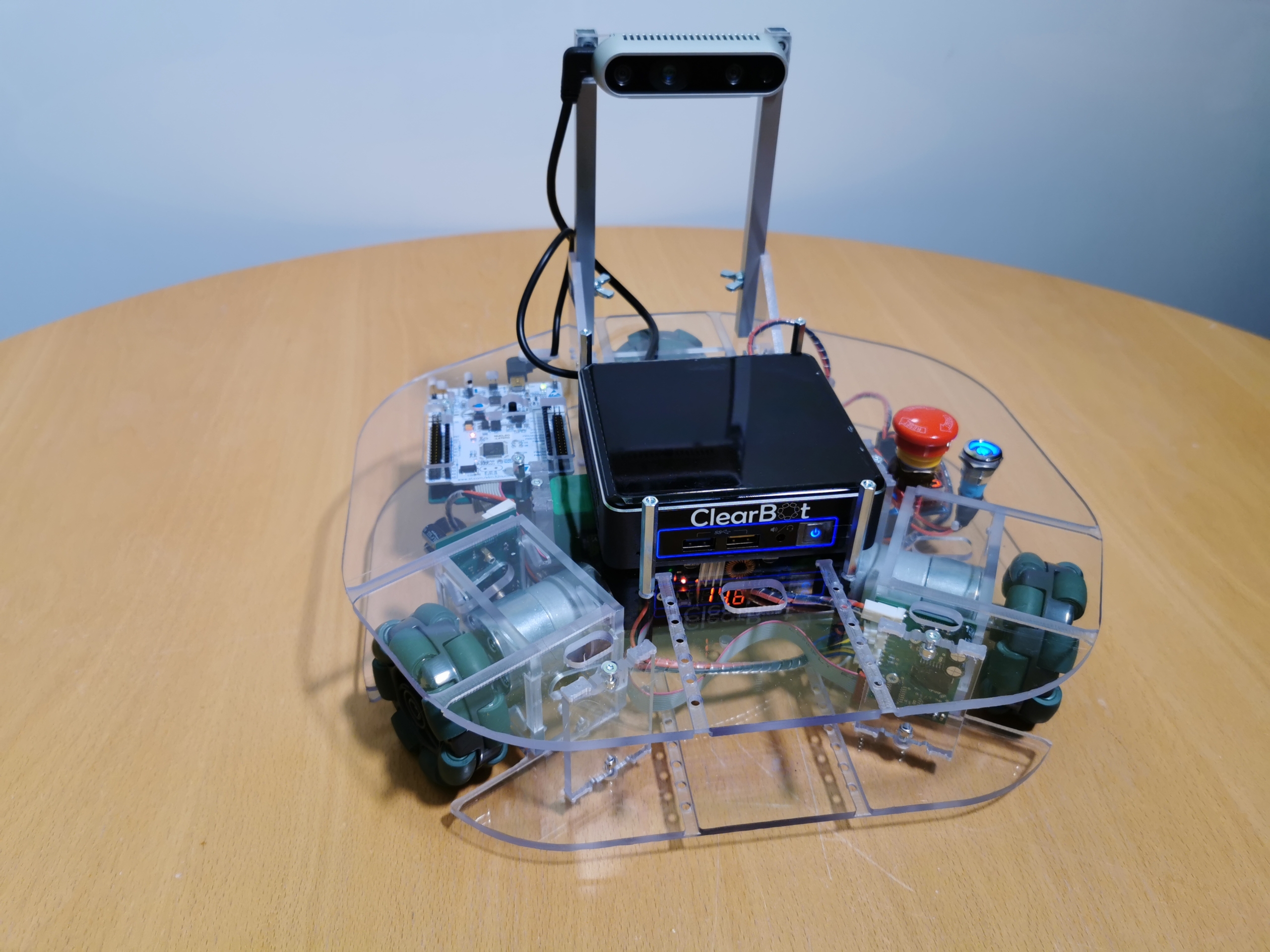
Sellise lähteülesandega maadles robootikainsener Veiko Vunder, kui ta Ameerika Ühendriikides Texase ülikoolis oma järeldoktorit tegi. Tema täpsem ülesanne oli luua lahendus, kus tuumajäätmete hoiustamistunnelite kontrollrobot edastaks 360-kraadi kaamera pildi virtuaalreaalsusprillidesse. Lahenduse eesmärgiks oli roboti tunnelis liikumise aja võimalikult efektiivne ära kasutamine, lastes inimeksperdil hinnata tunneli olukorda ja pakkuda selle põhjal välja tegevusstenaariume. Siit edasi oleks järgmiseks loogiliseks sammuks lasta robotil enesel sellesama kaamera pildi põhjal luua tunneli tingimustest mentaalne mudel ja kasutada seda oma tegevuse kavandamisel, ehk siis õpetada robot nägema. Ja see on täpselt see, mille Veiko Eestisse tagasi tulles ette võttis: tegi koos kolme teise Tartu teadlasega masinnägeva õpperoboti ClearBot.
ClearBot on üks keskmise robottolmuimeja mõõtu robot neile robootikahuvilistele, kelle jaoks on sellised tavalised õpperobotid “väikeseks jäänud” ja kes näevad oma tulevikutööd tihedalt seotud tööstusrobotitega. Veiko ütleb, et kuna ClearBoti loomise eesmärgiks oli eelkõige masinnägemise ja roboti-operatsioonisüsteemi (ROS) õpetamine, siis on robotil vaid üks andur (3D sügavuskaamera) ning võimas pardaarvuti (võimsam, kui sülearvuti, milles seda lugu kirjutan). Hea küll, mis see masinnägemine siis täpselt on?
Kõigepealt tuleb tõdeda, et masinnägemine ei ole pilditöötlus. Kuigi mõlema tehnoloogia sisendiks on visuaalsed andmed, on pilditöötluse väljundiks teine pilt, samas kui nägev masin otsib pildist mingit liiki teavet, näiteks inimeste nägusid, jalgrattaid või autode numbrimärke. Võimsamad masinnägemise seadmed kasutavad sügavõpet ja tehisintellekti kaamera nähtud piltidest oma mällu tegelikkuse lihtsustatud mudeli loomiseks – üsna sarnaselt sellele, kuidas inimene ümbritsevast enesele mentaalse mudeli konstrueerib. ClearBoti andur “näeb” tavalist fotograafilist pilti ja sügavusinfoga piltide pilve. Nende kahe andmeliigi põhjal saab õppida, kuidas selgitada robotile asukohta ruumis, kaardistada ruume ja planeerida liikumist. Aga „pärismaailmas“ on sarnast robotit võimalik kasutada ka hoopis tuumajäätmete tunnelist 3D mudeli loomiseks, et inseneridel oleks lihtsam kavandada tunneli puhastamist ja parandamist. ClearBoti roboti töö juhtimiseks kasutatakse tööstusrobotite juures levinud roboti operatsioonisüsteemi ROS. Tegemist on üsna paindliku avatud lähtekoodil põhineva platvormiga, mida kasutavad nii amatöörid kui ka suured tööstusgigandid nagu Boeing, Siemens, ABB jt. Põhimõtteliselt on ROS üks 21. sajandi töövahendeist, mille oskused saab edukalt omandada mõne väikese ClearBoti taolise roboti abil.
Robootikainsener Veiko igapäevatöö on päris vaheldusrikas. ClearBot on pidevalt arenev robot, mida saab kogu aeg parendada nii füüsiliselt kui ka tarkvaraliselt. Loomulikult osaleb selles töös kogu meeskond, milles igal liikmel on oma kindel vastutusvaldkond. Veiko vastutab ClearBoti tarkvara korrastamise, standardiseerimise ja ühilduvuse eest. Selleks tööks on vaja põhjalikult tunda ROSi, osata programmeerida ning omada head ülevaadet ka kaudselt seonduvast. Toon järgmise näite. ROSi käske saadetakse ClearBoti robotisse läbi mõne Linuxi keskkonna. Üks levinud graafilisi Linuxi keskkondi on Ubuntu ja tihti kasutatakse seda emulaatori abil Windowsi arvutis, mis võib põhjustada probleeme. Ja samal ajal, mil Veiko andis mulle seda intervjuud siin, tegeleski ta (edukalt) ühe kliendi Ubuntu emulaatori probleemidega.
Veiko kujunemistee Viljandimaa aleviku koolipoisist masinnägemisega tegelevaks robootikainseneriks on paeluv. Tartu Ülikooli infotehnoloogia bakalauruseõppe lõputööks arendas ta kaameradraivereid. Magistrikraadi omandas ta arvutitehnikas, ehitades arukaid materjale (täpsemalt, elektroaktiivseid polümeere) kasutades läätse, mille kõverust ehk fookust sai programmide abil muuta. Peale doktoriõpet, Texase ülikoolis, ehitas ta virtuaalreaalsusprillide väljundi lahendust hooldusrobotile ning nüüd tegeleb masinnägemise õpperobotiga. Mulle tundub, et siin võib tajuda mustrit, mis on põimitud ümber nägemise, robotite ja ägedate tegevuste, mistõttu ootan põnevusega, mida Veiko järgmisena välja mõtleb. Senikaua aga ootab ClearBot Eesti teaduse- ja tehnoloogiahuvilisi arendama oma teadmisi masinnägemisest ja sellega seotud tehisintellektist.
Tekst: Jaanus Leoste
Fotod: Veiko Vunder, Dominik Scythe (unsplash.com)
Avaldatud: 28.08.2020



Sündmused
Harrastusteaduse seminar: kalastajate ja teadlaste koostöö
Tartu Loomemajanduskeskus

JULGUS TEGUTSEDA – tulevikutüdrukute inspiratsioonipäevad
Rakett69 teadusstuudiod, Valukoja 12, Tallinn
CADrina 2026
Elektrilevi esitleb: Tähelepanu! Elektrikuu
Energia avastuskeskus, Tallinn
Rakett69 16. hooaja fännipäev
Rakett69 teadusstuudiod, Valukoja 12, Tallinn
Näitused

Ahhaa, hiidputukad!
AHHAA Teaduskeskus

Hüvasti, noorus! Kuidas sina tahad vananeda?
Eesti Tervisemuuseum
Tartu Ülikooli loodusmuuseumi näitus „Maa ja vee vahel – meie särisev suhe soodega“
Tartu Ülikooli loodusmuuseum, Vanemuise 46
Mis on valgus? Georg Friedrich Parroti füüsikakabinet
Tartu Ülikooli muuseum, Lossi 25